I decided to replace the old robot car that was built using a cheap kit, with a more powerful RC car. The biggest differences are the steering mechanism and motor power.
Steering Mechanism Difference
The original robot car used what was called differential steering, in that to turn in a direction, the opposite wheel would spin faster compared to the wheel on the same side. To illustrate with an example, to turn left, the right wheel would spin faster while the left wheel spins slower, causing the car to rotate to the left. |
| Mechanics of differential steering: Source |
However the problem with this was that the wheels would cause the car to slip on a difficult to grip surface such as a timber floor. This was seen in my earlier video demonstration where the car would occasionally slip while turning (Link to video). This led me to decide to use a different steering mechanism.
The new RC car that I am currently using, utilized what's called Ackermann steering. This uses a steering linkage that orients each wheel appropriately. The main property of this steering mechanism is that the wheels are oriented at slightly different angles to compensate for the different circle radii that are being traced during turning. This prevents the wheels from slipping whilst turning for the cost of being more complex.
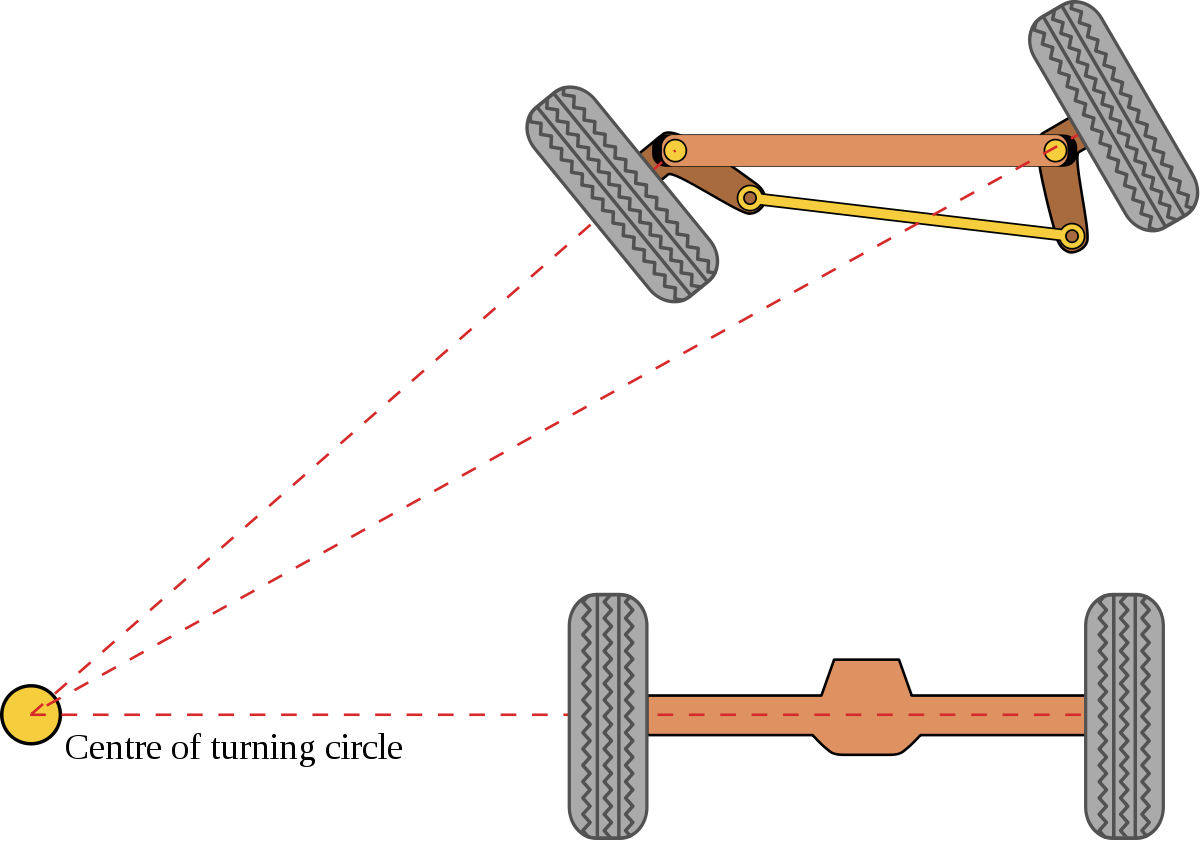 |
| Different angles of the wheels: Source |
Motor Power
The other significant difference is the motor power. The cheap robot car kit uses these small DC motors which are powered by a higher voltage but a lower current. These are typically powered by combining several AA batteries in series to operate in the voltage range 9-12V. Then gears are used to convert the high rotation to more torque. Even then, the power or torque of these motors are severely limited by the battery current output (1A maximum for AA batteries) and also the thickness and number of coils that the motor has.
 |
| Cheap DC Motor |
 |
| RC 390 DC Motor |
The RC car
Without further ado, here's the new car that I will be using. It is a RC 4WD 1:12th Off Road Truck. The main reason I picked this was that it was on sale for half price! It seemed to do the job and has the much needed Ackermann steering. Another reason was the size of it meant it would be able to hold the components needed for autonomous driving. Link to car

 |
| The car without the cover |
No comments:
Post a Comment